











Teil 1: Oktober 2017 der Heckspannt
Als erstes ging es mit dem Heckspannt los. Wie in der Bauanleitung des Tauchsystems von Maximus Modellbau beschrieben habe ich die Teile mit 2K Kleber zusammengeklebt. Mein erstes Problem war die Antriebswelle. Da die Tauchröhre im Boot genau waagrecht liegt und das Loch im Heckspannt genau mittig ist, habe ich einen Versatz von 6mm zur Antriebswelle im Heck des Seehunds. Die Antriebswelle liegt etwas tiefer im Rumpf. Diesen Versatz wollte ich mit einem Getriebe lösen. Damit keine Schärkräfte auf den Simmerring kommen, welcher die Antriebswelle abdichtet, baute ich hinter dem Simmerring ein Kugellager ein. Die Welle hat 3mm, und das Kugellager hat 8mm Außendurchmesser. Normalerweise soll der Simmerring ebenfalls mit 2 K Epoxidharz verklebt werden. Ich probierte es mit "Plasti Dip" Flüssiggummi. Wie ich das gemacht habe, sieht man gut auf dem Bild 40:
 |
 |
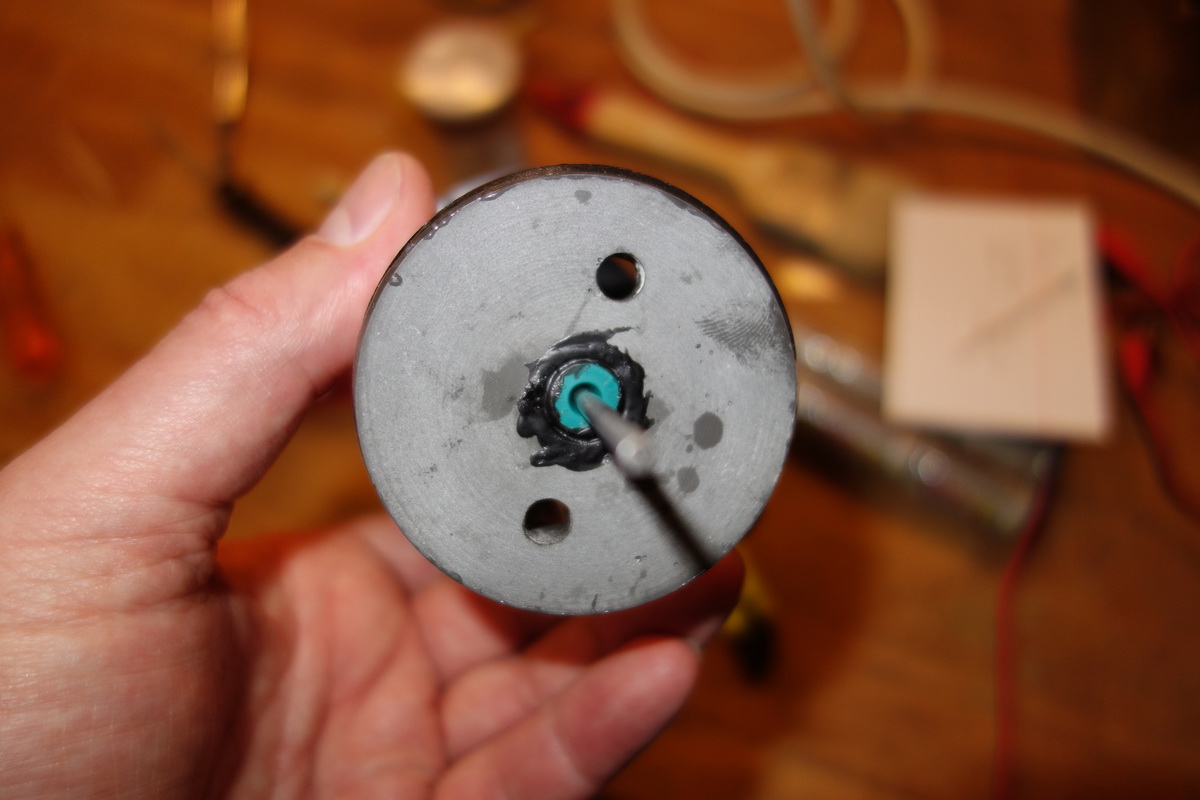 |
| Bild 20 | Bild 30 | Bild 40 |
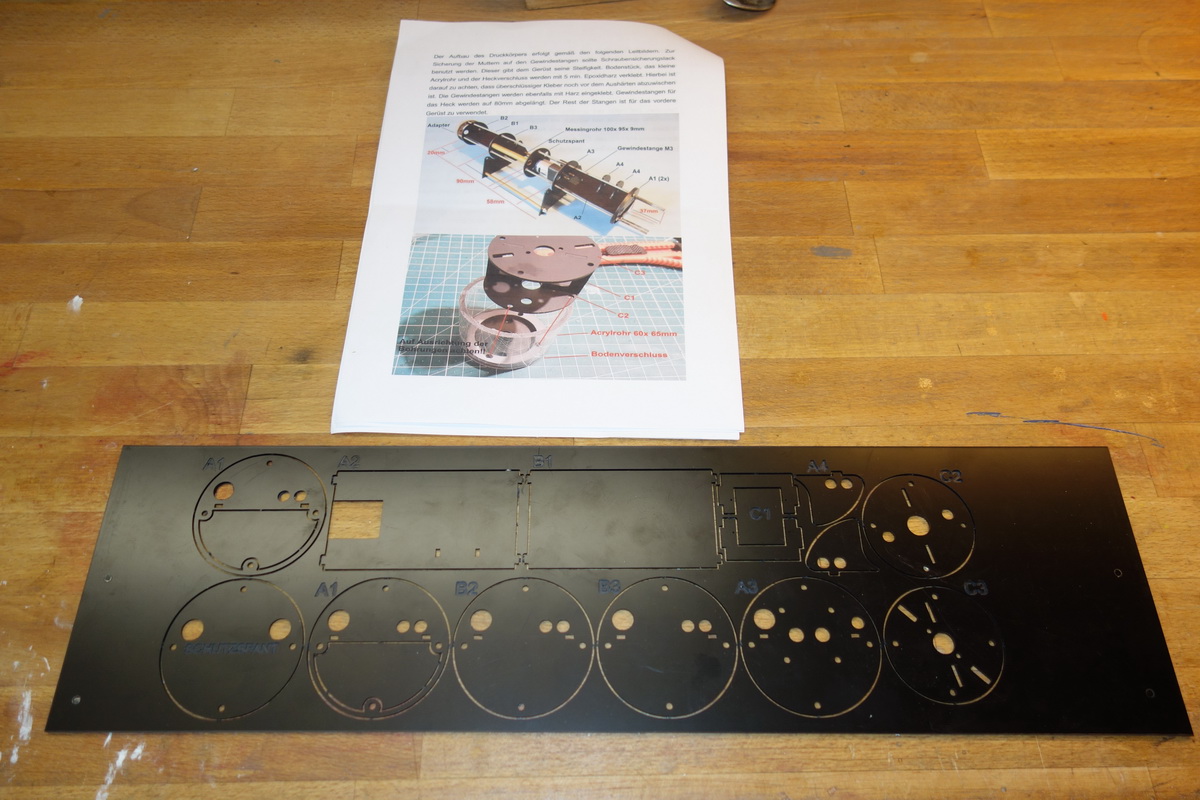
Weiter ging es mit dem Hauptspannt des Technikgerüstes und dem Motorspannt. Das ging alles problemlos nach Bauplan. Es dauerte halt nur eine Weile bis man die Muttern am richtigen Platz hatte und die Spannten im Winkel und Abstand sauber stimmten. Hier musste ich sehr sauber arbeiten damit alles richtig ausgerichtet war und das Technikgerüst im Winkel und gerade ausgerichtet war. Verspannungen durch unsauberes Ausrichten der Spannten hätten dazu geführt, dass das Technikgerüst sich nicht gut in die Röhre schieben lässt.
 |
 |
 |
| Bild 50 | Bild 60 | Bild 70 |