











Und jetzt an den wirklich spannenden Teil beim Bau meiner Fähre auf den ich mich schon gefreut habe: Den Einbau des VSP Antriebs.
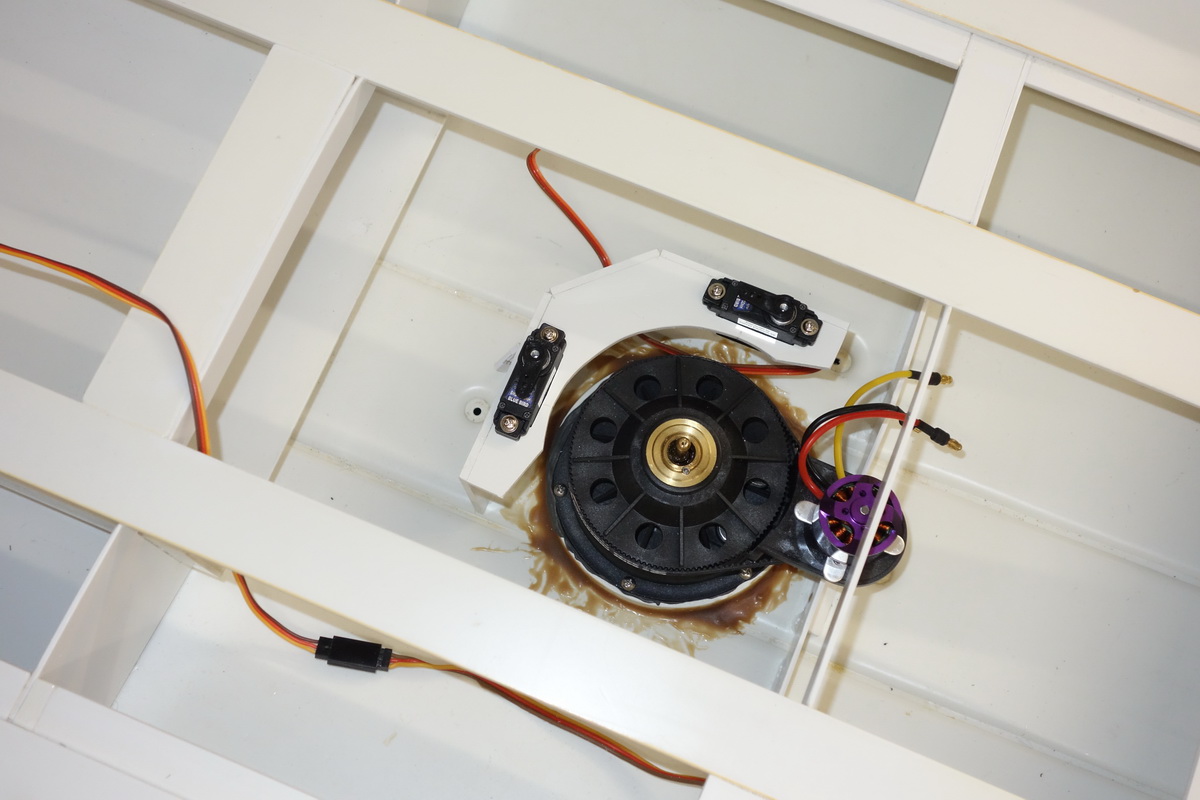
Zuerst habe ich die ABS Ringe, welche die Aufnahme des VSP-Antriebs bilden, in die bereits gesägten Löcher im Rumpf geklebt. Verklebt habe ich die ABS Ringe mit Ruderer L530 Kelber und dann am Rand zur Verstärkung mit Stabilit Express.
 Aussen in den Aufnahmering wird eine Dichtschnurr zum Abdichten einlegen und der VSP Antrieb wird dann einschrauben. Und wieder musste eine Servohalterung konstruiert werden, diesmal für je 2 Servos pro Antrieb und das Kreisförmig um den VSP Antrieb herum. Die Servos müssen vorne und hinten spiegelbildlich eingebaut werden, damit das Steuern der VSP Antriebes auch funktioniert. Damit die Servos wirklich stabil lagern, habe ich alles mit 3mm ABS Teilen aufgebaut. Ich habe alles mit Bleistift auf die ABS Teile aufgezeichnet und mit einer Dekopiersäge ausgesägt.
Aussen in den Aufnahmering wird eine Dichtschnurr zum Abdichten einlegen und der VSP Antrieb wird dann einschrauben. Und wieder musste eine Servohalterung konstruiert werden, diesmal für je 2 Servos pro Antrieb und das Kreisförmig um den VSP Antrieb herum. Die Servos müssen vorne und hinten spiegelbildlich eingebaut werden, damit das Steuern der VSP Antriebes auch funktioniert. Damit die Servos wirklich stabil lagern, habe ich alles mit 3mm ABS Teilen aufgebaut. Ich habe alles mit Bleistift auf die ABS Teile aufgezeichnet und mit einer Dekopiersäge ausgesägt.
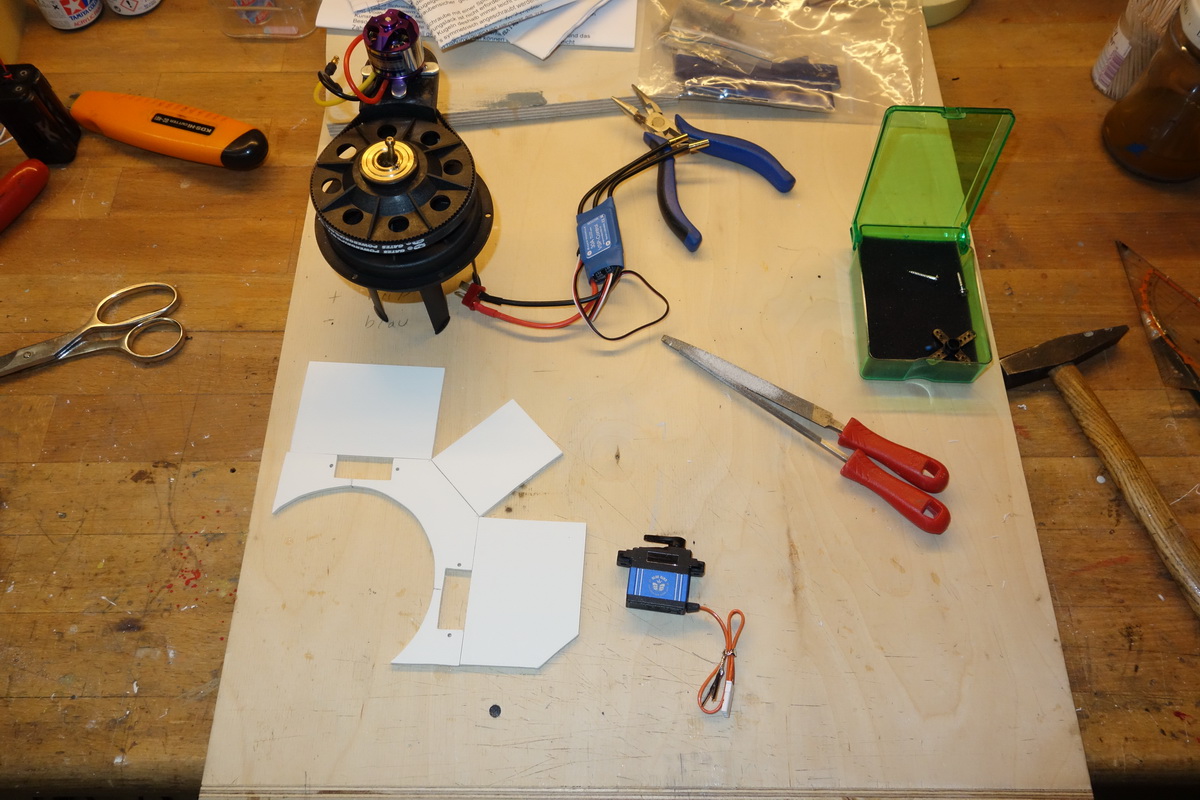
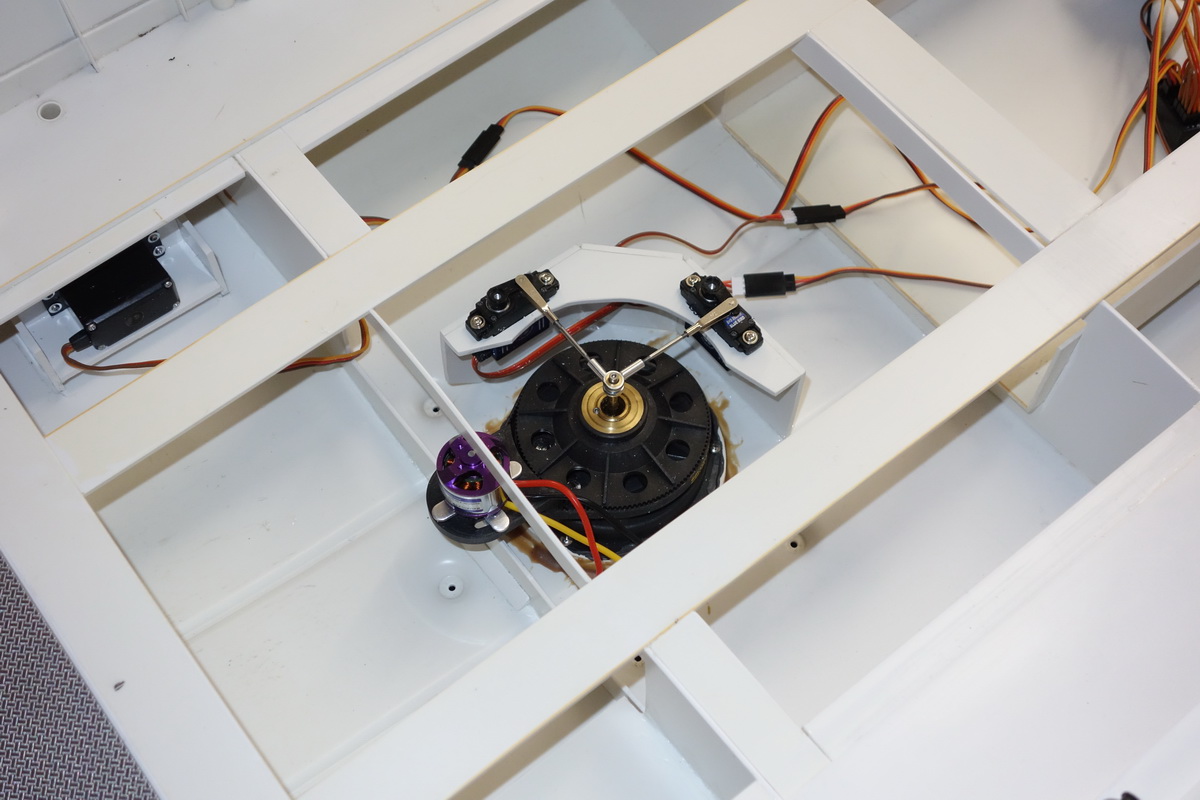
Dann wieder die gesamte Konstruktion verklebt und die Servos eingebaut. Nun die Servohalterung mit einer Feile an die Rumpfform anpassen. So kann man feinfühlig die Teile genaue an den Rumpf anpassen. Zum Schluss alles in den Rumpf einkleben.
Nun die Anleitung für den VSP Antrieb studieren und entsprechend der Anleitung die Gestänge für die Steuerung aufbauen.
Zusammen mit dem VSP-Antrieb habe ich einen Ringbegrenzer gekauft. Wofür braucht man sowas?
Gesteuert werden die beiden VSP Antriebe über je einen Kreuzknüppel. Die Kreuzknüppel beschreiben aber ein Quadrat und keinen Kreis. Somit würden beim Vollausschlag in den Ecken die Servos zu weit gehen und die Steuerung des VSP beschädigen. Bei Graupner Fernsteuerungen gibt es dafür extra im Programm einen Ringbegrenzer, aber ander Fernsteuerungen haben so ein Programm normalerweise nicht. Deshalb musste ich einen Ringbegrenzer kaufen welcher die Ausschläge der 4 Servos zur Steuerung der beiden VSP je auf einen Kreisausschlag bringt. Das alles gibt es bei Bauer Modellbau in Wendlingen.
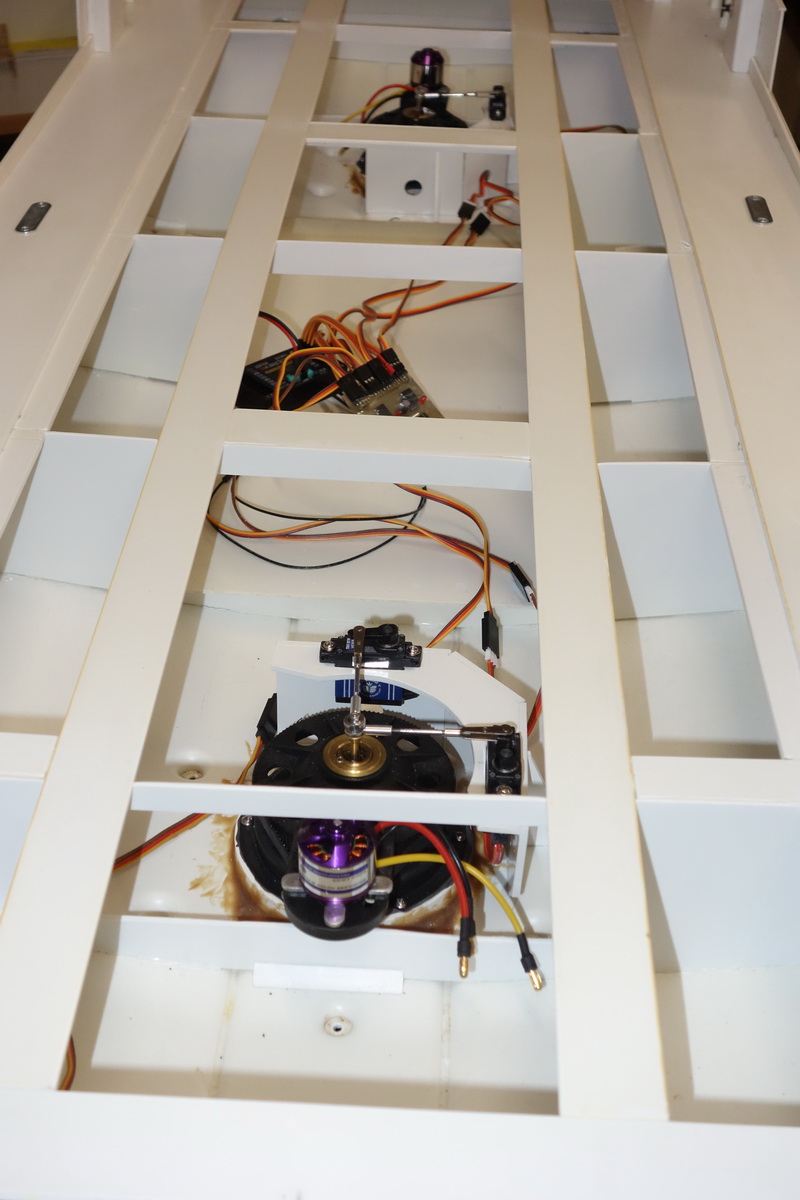
Nach einem mehren Abendenden mit Anschlüsse & Kabel löten, einstellen und programmieren ist der VSP Antrieb jetzt lauffähig und die beiden Regler für den Brushless-Antrieb angeschlossen.
 |
 |
Um nun auch mit der Fähre ins Wasser zu könne, habe ich die beiden Schutzkörbe unter den Rumpf montiert. Und nun auf zum ersten Badewannentest. Und was soll ich sagen, es hat alles auf Anhieb funktioniert. OK, ich musste noch 2 Servos vom VSP umpollen damit die Richtung stimmt, aber alles blieb dicht, die Antriebe haben soweit gut funktioniert und die Servos nirgends sind angeschlagen.
Das stimmt für den weiteren Bau optimistisch.