











- Details
Gute Frage, warum ausgerechnet Modellbau?
Mich hat Modellbau schon immre gereizt. Angefangen hat das in der Kindheit mit Plastikmodellen. Modellbau mit Fernsteuerungen waren in meiner Kindheit praktisch unbezahlbar. Das kam dann erst nach dem Studium als es das erste eigene Geld gegeben hat.
Aber nur Schiffe oder Autos bauen fand ich irgendwie nicht so interessant. Ich wollte etwas ausergewöhnliches und U-Boote haben mich gerade deshalb fasziniert. Es war die Technik die in einem U-Boot besonders war. Um aber auch handwerklich Techniken zu lernen um ein U-Boot bauen zu können, habe ich erst mal mit Schiffen angefangen. Dann brachte Robbe einige U-Boote auf den Markt, und eine Typ VII war auch dabei. Dies war dann mein erstes U-Boot. Aber das mit dem dynischen tauchen ging einfach nicht. Der Restauftrieb ist bei diesem U-Boot einfach zu gross um es mit Geschwindigkeit und Tiefenruder sauber zu tauchen. Da geab es viele Rückschläge und ich habe versucht das Boot mit einen Tauchtank auszustatten. Aber auch das ging schief.
Also wollte ich ein U-Boot mit einem richtigen Tauchtank. Die Wahl viel auf die Nautilus von Engel. Auch das etwas ganz besonderes, den auch die Nautilus von Jules Verne aus dem Disney Film von 1954 war auch so etwas wie ein Kindheitstraum. Bis heute ist dieses U-Boot für mich die Nummer 1. Beim Bau dieses U-Bootes habe ich sehr viel gelernt, vor allem was die Lackierung anbelangt.
Und genau das ist, was mich am Modellbau reizt. Jedes Modell ist ein Unikat, in jedem Modell lernt man neue Techniken. Man Baut ein Modell von Anfang bis zum Ende, was ja in der heutigen Zeit kaum mehr Möglich ist. Egal ob es ein Bausatz ist, ober man etwas komplett selber Baut. Alles startet mit einer Idee, dann kommt die Planung. Man etscheided nach seinem Können wie man das Modell baut und man sieht wie beim Bauen das Modell nach der eignen Vorstellung entsteht. Am Ende staht die Farbgebeung, was einem Modell das Leben einhaucht. Und wenn es fertig ist, nach vielen Wochen, Monaten oder manchmal Jahren ist man Stolz auf sein eignen Modell. Nichts, was man einfach so im Laden kaufen kann und etwas was wo viel eignen Energie und Fantasie drin steckt. Ein Unitak eben.
- Details
Es gibt so ein paar Fragen, welche ich als U-Boot Modellbauer immer wieder gefragt werde:
Hier mal meine persönlichen Top 6:
1) Warum baue ich eigentlich überhaupt U-Boote?
Mich fasziniert die Technik von U-Booten. Warum ein Schiff schwimmt, ist eigentlich jedem klar, aber warum ein U-Boot taucht und wieder hoch kommt, ist schon eine technische Meisterleistung. Warum taucht ein U-Boot unter Wasser stabil und dreht sich nicht, etc. Das ist auch im Modellbau eine Herausforderung, die mir Spaß macht. Außerdem ist U-Bootfahren wie fliegen, nur unter Wasser. Man hat 3 Dimensionen.
2) Ein U-Boot sieht man doch unter Wasser nicht?
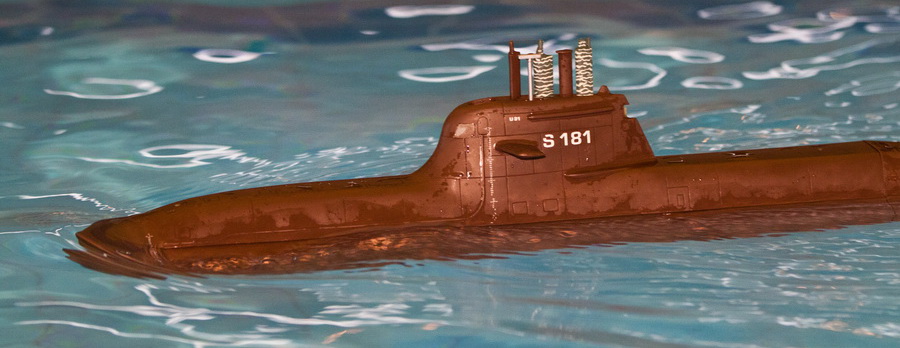
Das ist richtig, wenn man zu tief taucht sieht man das U-Boot nicht mehr. Aber ich fahre alle meine U-Boote auf Sicht und habe gar nicht die Motivation, Tieftauchrekorde zu brechen. Es ist mir genug zu beweisen, dass ein Modell-U-Boot tauchen kann und sicher wieder hoch kommt, ob das nun 1 m ist oder 10 m, find ich ist egal. Auf Sicht zu tauchen, hat übrigens auch einen Sicherheitsaspekt.
3) Wie tief kann das U-Boot denn tauchen?
Die meisten Modell-U-Boote sind auf eine Tauchtiefe von 10 m konzipiert. Aber da ich auf Sicht tauche, sind das meistens nicht mehr als 2 m. Damit habe ich also eine erhebliche Reserve.
Es gibt aber auch ein weiteres pysikalisches Problem, Fernsteuerungen mit 40 Mhz haben in Süßwasser eine Reichweite von circa 2-3 Meter Tiefe. Damit ist also die Fernsteuerung der begrenzende Faktor beim Tauchen. In Salzwasser wird es noch kritischer, da dort die Funkwellen noch schlechter unter Wasser kommen.
4) Warum hast Du keine Kamera mit dabei?
Weil man unter Wasser nichts sieht. Um mit einer Kamera unter Wasser gut filmen zu können, bräuchte man auch noch viel Licht. In natürlichen Gewässern wird es also schon schwierig. Außerdem sieht man ja nicht weit und meistens wären die Aufnahmen einfach nur grau.
In wieviel Gewässern hat man schon genug Licht und so gute Sicht, dass man unter Wasser etwas erkennt? Also lohnt sich das nicht wirklich, sondern ist nur ein technischer Gag.
5) Was ist mit 2,4 GHz Fernsteuerungen?
Nun die gehen unter Wasser gar nicht. Je höher die Frequenz, desto schlechter breiten sich Funkwellen unter Wasser aus. Deshalb verwenden wir immer noch unsere guten, alten 40 Mhz Funkfernsteuerungen, noch besser wären 27 Mhz Funkfernsteuerungen.
6) Wie taucht ein U-Boot?
Generell wird zwischen dynamischem und statischem Tauchen unterschieden:
6.1) Dynamisches Tauchen:
Das U-Boot hat einen geringen Restauftrieb. Dieser wird über die Fahrgeschwindigkeit und die Tiefenruder überwunden, damit das U-Boot taucht. Steht das Boot unter Wasse,. taucht es bedingt durch den Restauftrieb wieder auf.
6.2) Statisches Tauchen:
Das U-Boot hat einen Kolbentank (ähnlich einer Spritze). Über einen Motor und eine Spindel wird der Kolben angezogen und saugt damit Wasser in den Tauchtank. Der dabei entstehende Überdruck geht in den Druckkörper des U-Bootes. Das hat den Vorteil, ist das Boot undicht, steigen Blasen auf.
Will man wieder auftauchen, polt man den Motor um und fährt den Kolben wieder aus, dieser drückt nun das Wasser aus dem Tauchtank und das U-Boot wird wieder leichter. Es taucht auf. In meinen U-Booten verbaue ich meist Tauchtanks von Preishammer (Firma Engel).
Es gibt auch einige andere Systeme wie Schlauchpumpe oder mit Pressluft. Aber bis jetzt habe ich mich mit diesen Systemen noch nicht befasst.
6.3) Halb-Statisches Tauchen:
Meine U552 (eine Robbe Baukasten) habe ich Halb-Statisch konzipiert. Was bedeutet, dass ich einen Tauchtank eingebaut habe der 500 ml Wasser aufnimmt. Jedoch verbleibt nach dem Fluten ein Restauftrieb von ca. 250 gr, welchen ich dann durch Geschwindigkeit mit den Tiefenrudern aufhebe. Der Grund für mich war, dass Robbe das Boot eigentlich statisch konzipiert hat, aber eigentlich nur funktioniert wenn man das Boot so trimmt das es für die Überwasserfahrt viel zu tief liegt. Das sieht nicht schön aus. Durch den Kolbentank lässt sich das Boot nun leicht über die Tiefenruder unter Wasser drücken und der Restauftrieb bringt Sicherheit damit das Boot immer wieder auftaucht. Mit einem 750 ml Tauchtank ist es auch Möglich das Boot voll statisch zu tauchen, dann wird es in der engen Röhre aber wirklich sehr eng, das wollte ich nicht.
Außerdem ist U-Bootfahren wie Unterwasserfliegen.
- Details
U-Boot-Steuerung mit Brücke von Jeti 2,4GHz auf Graupner 40MHz
Motivation
Modell-U-Boote lassen sich unter Wasser nicht mit 2,4GHz Fernsteuerungen steuern. Mit dem Kauf einer 2,4GHz Jeti DC-16 Fernsteuerung entstand bei Detlef auch gleichzeitig der Wunsch, seine U-Boote mit der neuen Fernsteuerung zu steuern. Im Internet fanden sich nur Beiträge, aus denen man lesen konnte, dass es andere Modellbauer geschafft haben sollen, ihr U-Boot mit einer 2,4GHz Jeti-Fernsteuerung unter Wasser zu steuern. Allerdings gab es keine verwertbaren Hinweise darauf, wie sie das geschafft hatten.
So entwickelte Detlef die Idee, eine Brücke von 2,4GHz auf 40MHz anhand des PPM-Signals eines Jeti RSat2-Empfängers zu bauen.
Realisierungsidee
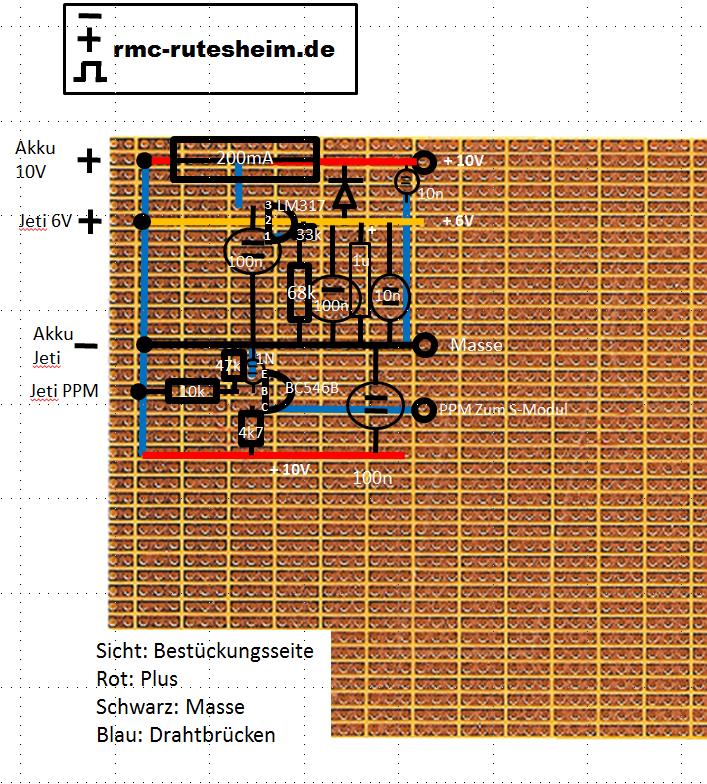
Der Kern der Idee besteht darin, ein Graupner 40MHz Sendemodul TX 40 einer MC19 mit dem PPM-Signal eines Jeti-Empfängers Rsat2 zu speisen. Das Graupner Sendemodul kann nicht direkt mit dem PPM-Signal gespeist werden. D.h. das positive 5V PPM-Signal von Jeti muss auf ein negatives 10V PPM-Signal umgesetzt werden.
Zusätzlich benötigt das Sendemodul neben der 10V Versorgung noch eine 6V Versorgung. Mit den 6V wird auch der Rsat2 versorgt.
Hier das Blockschaltbild der Realisierungsidee:
Adapter-Elektronik
Der PPM-Adapter:
Spannungsversorgung 6V:
Versuchsaufbau

Fertiggerät
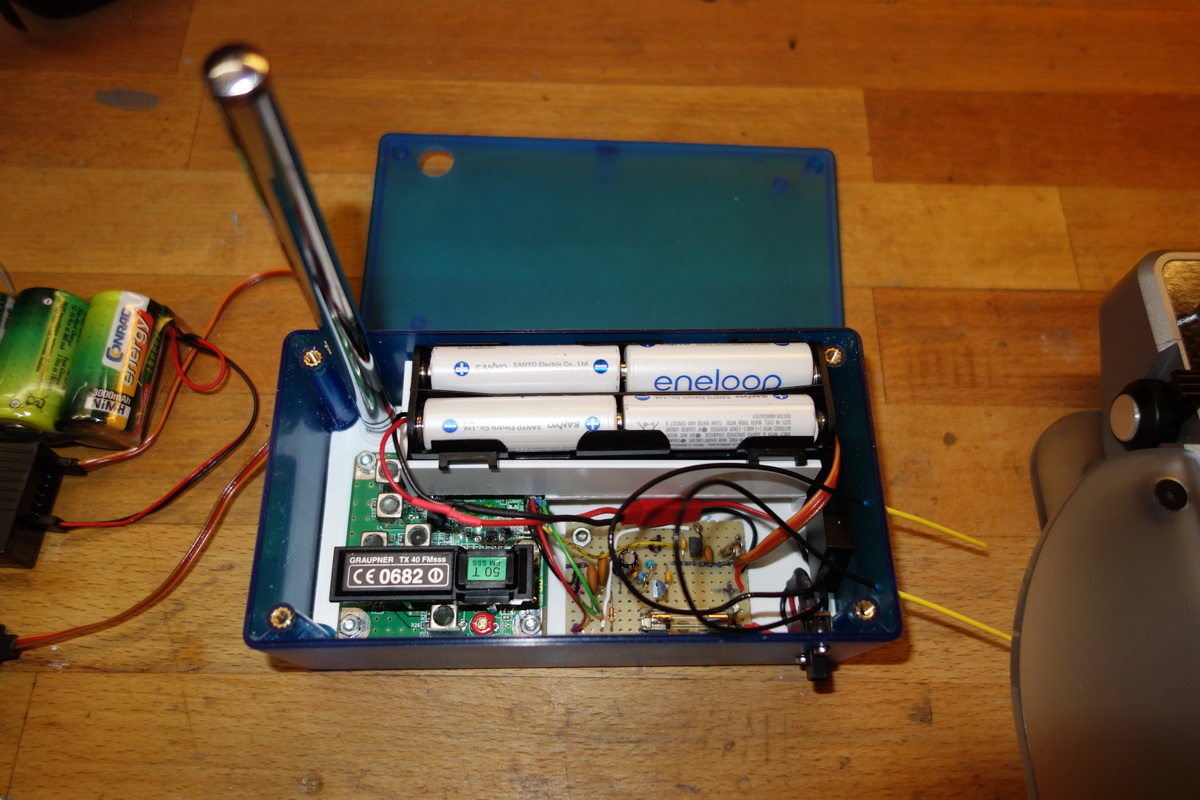
Die Schaltung wurde nun auf eine Lochrasterpaltine aufgebaut und mehrmals überprüft:
Danach in ein Gehäuse vom Grossen "C" eingebaut. Damit alles etwas kompakter wird habe ich einen ABS-Rahmen eingebaut, auf dem alle Schaltungsmodule, die 40 Mhz Antenne und die Stromquelle Platz finden. Zur besseren Wartung kann man den Rahmen mit allen Komponenten herausnehmen. Als Akkus kommen Eneloop AA Akkus zum Einsatz.
Hier nun die fertige Schaltung:
 |
 |
 |
Jetzt kann man mit einer Jeti DC16 auch U-Boote fernsteuern. Damit kann man zwar denn vollen Funktionsumfang des Senders nutzen, aber natürlich nicht die Telemetrie.
Der 40Mhz Empfänger ist und bleibt nun mal nicht Rückkanalfähig.